Här är hur man hackar en Rumble robot med en Arduino microcontroller så att när den känner ett hinder, det automatiskt vänder sig om och huvuden i en annan riktning. Du kan använda koden tillgänglig, eller skriv och se hur din roving rumblebot svarar. Om du inte är van att meka med robotar, det är ett ambitiöst projekt, men dessa steg (tillsammans med video) kommer att gå igenom den.
Steg
- 1Lägg några batterier i roboten för att se om det fungerar. Vanligtvis tar de fyra AA-batterier.
- På baksidan finns några växlar. Det är "off / on" och även "a / b" för att avgöra vilket lag roboten är på. Tryck på "on" switch. Om boten fungerar, bör den säga sitt namn. Sätt på locket och batterierna åt sidan för nu.
2
Ta huvudet av roboten. På "halsen" av roboten (mellan huvud och kropp) finns det en liten skruv som kan tas bort med en liten Phillips. Sätt skruven åt sidan. Det finns en liten läpp på framsidan av huvudet som är lite knepigt, men bör lossna efter ett litet ljus vrida och vända. 3
Koppla loss kabeln från moderkortet som ansluter huvudet till kroppen. Med hjälp av en liten, bända tillbaka flikarna hålla styrelsen ner och poppa ut kortet. Du bör nu ha bara den nakna styrelsen. Du bör se den svarta mikro-processor som gör bot flytta bakåt och framåt. Detta är vad vi kommer att hacka och ledningar in.
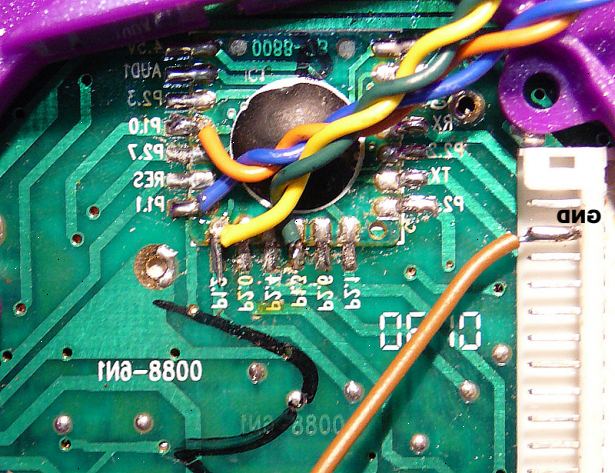
dessa är de stift outs på tavlan där du behöver för att ansluta nya kablar. De viktigaste stiften vi sysslar med är de fyra som arbetar drivmotorerna. De är anslutna till "H-brygga" som ger oss möjlighet att utlösa motorerna för att rotera framåt eller bakåt genom att lägga på en positiv spänning till en av två trådar för varje motor. Det finns en för framåt och en för körning bakåt på varje motor. De är anslutna enligt följande:
Pin 1,0 vänster motor framåt stift 1,1 vänstra motor reverse stift 1,2 högra motorn framåt stift 1,3 högra motorn BACK
4
Löd trådarna som kommer att gå ut till Arduino. I denna bild ser vi jordledningen som är ansluten till stiftet märkt i fotot på den vita kontakten och de övriga fyra trådarna lödas på plats. 5
Skruva loss överkroppen och dra isär. 6
Wire allt tillsammans med detta schema. Videon visar hur allt hänger ihop. Gör dina kablar minst 5 "i längd för att göra det lättare att montera upp allt. Det schema som visas i det följande antas att det kommer att finnas en sensorn på framsidan av bot. Videon nedan visar hur du kan göra båda armarna förnuft hinder, men detta kommer att kräva en extra bump switch (ansluten till stift 3 och jordledningen) som beskrivs i videon avsnittet. Koden kommer också att behöva ändras därefter.
om du monterar allt på toppen av chassit där huvudet brukade vara och montera bula på fronten, använd en mikrobrytare och limma på vissa bitar av tråd från ett gem som morrhår. Strecken i brytaren bör sträcka vänster och höger på samma bredd som roboten. Lägg till ytterligare en morrhår pekar nedåt nära golvet. Dessa kommer att hjälpa bot undvika allt som inte kan returnera ett eko från PING sensorn. Se till PING sensorpunkter framåt och är på 90 grader mot golvet. LED ansluten till stift 13 blinkar varje gång ping skannar och det kan monteras var som helst du vill. Strömbrytaren är frivilligt och helt enkelt går i linje på den positiva batterikabeln.
när du ansluter moderkortet till mikrokontroller, kan du behöva göra en skåra så att trådarna inte kommer i kläm när du sätter roboten ihop.
batteriet kan hållas på plats med en liten bit av kardborrband eller något EPS skum. Minuskabeln av 9-volts batteri till reservbatteriet ingång. Var noga med att placera bygeln på "förlängning power" inte "usb."
Om du vill kunna använda "on / off" switch, anslut den vita kabeln till baksidan av switchen. Makten ska gå till växeln, springa tillbaka till den vita kabeln, och mata Arduino ström när du slår på den.
PING sensorn kan gå någonstans på framsidan av roboten. I detta exempel har sensorn limmats in i fronten av roboten. Klipp ut "eye-hål" på framsidan och sedan bara lägga lim runt "ögon" av sensorn för att hålla plattan robust. Flatkabeln som kopplas till huvudet av roboten har skalats ner till tre ledningar (i stället för de ursprungliga fyra) och löds till de tre ledningarna på PING sensor. Den andra änden ansluter till arduinoen enligt den schematiska.
7
Löd kablar och ansluta dem till Arduino styrelse. Se den schematiska än en gång för hjälpen. 8
Sätt roboten tillbaka tillsammans. 9
Ladda upp koden. Anslut USB-kabeln till datorn och anslut den andra änden till Arduino USB-port. Ställ din robot på en utbyggnad så att hjulen inte röra någonting och starta upp Arduino. Kopiera och klistra in den i ett nytt fönster i Arduino programvaran. Spara skissen som "rumblebot ping bump" och ladda upp den. Efter det är laddat, stänga av Arduino, koppla ur USB-kabeln, ställer bot på golvet och slå på Arduino. Det ska börja köra framåt med blinkande lysdiod. När det blir inom 30 cm från ett objekt, bör det vända bort och kör framåt. Om den träffar ett föremål och utlöser bump switch, borde det sluta, ändra sin riktning och sväng, sedan fortsätta framåt. Saker du behöver
- Hitta en Rumble robot på ebay, på en loppmarknad eller en sparsamhet butik.
- Arduino microprocessor
- En Parallax PING sensor
- En LED
- En mikrobrytare
- Ett 100 ohm motstånd
- Arduino programvara som du kan ladda ner
- Du behöver också kodning, som du kan skriva själv eller använda