Många människor anser en robot som en maskin som kan köras självständigt. Men, om du bredda definitionen av "robot" något, kan fjärrstyrda objekt anses vara en robot. Du kanske tror att bygga en fjärrstyrd robot är tufft, men i verkligheten är det enkelt om du vet hur. Denna artikel kommer att förklara hur man bygger en fjärrstyrd robot.
Steg
- 1Inse vad du kommer att bygga det första steget i att bygga en fjärrstyrd robot är att inse att du inte kommer att kunna bygga en fullstor, tvåbent, humanoid robot som kan göra alla dina sysslor. Inte heller kommer du att bygga en robot med flera klor som kan nå ut och plocka upp 100 £ vikter. Du kommer att behöva för att börja bygga en robot som ska kunna gå framåt, bakåt, vänster och höger från dig styra den trådlöst. Men när du får grunderna ner och ha denna enkla robot byggd, kan du lägga vanligt och ändra saker på den. Du bör vanligtvis gå med principen att ingen robot någonsin är klar. Det kan alltid ändras och göras bättre.
- 2Planera din robot Innan bygga din robot, även innan du beställer delar. Du behöver för att designa din robot. För din första robot du ska gå med en enkel konstruktion med bara två servomotorer på en platt plastbit. Denna design är verkligen enkelt och oftast lämnar extra utrymme för att lägga till extra saker när det är byggt. Planerar att bygga något om 15 cm. med 20 cm. För en robot denna enkla, bör du kunna bara dra ut på papper med hjälp av en linjal. Rita det samma storlek på papper som det borde vara i verkliga livet, eftersom roboten är så liten. När du kommer in i större, mer komplexa robotar, bör du börja att lära dig att använda CAD eller ett program som liknar det, t.ex. Google Sketchup.
- 3Välj dina delar är det fortfarande inte tid att beställa delar. Men du bör välja dem nu och vet var man kan köpa dem. Försök att beställa från så få platser som möjligt och du ibland kan spara pengar på frakt. Du behöver ett material för chassi, två "servo" motorer, ett batteri, en sändare, en sändare och en mottagare.
- Välja en servomotor för att flytta roboten måste du använda motorer. En motor viljestyrka ett hjul och en för andra. Detta gör att du kan använda den enklaste styrningen metoden, differential-enhet. Detta innebär att gå framåt båda motorerna snurra framåt, gå bakåt båda motorerna snurra baklänges, och att vända en motor går och en motor stannar fortfarande. En servomotor är annorlunda än en grundläggande likströmsmotor eftersom en servomotor är inriktad, kan endast vridas 180 grader, och kan överföra data tillbaka på dess position. Detta projekt kommer att använda servomotorer eftersom det är lättare och du behöver inte köpa en dyr "varvtalsregulator" eller en separat växellåda. När du förstår hur man bygger en fjärrstyrd robot, kanske du vill göra en till (eller modifiera den första) att använda likströmsmotorer, snarare än servomotorer. Det finns fyra grundläggande saker du behöver oroa dig för när du köper servomotorer. Dessa är varvtal, vridmoment, storlek / vikt, och om de är 360 Modifierbara. Eftersom servomotorer bara vänder 180 grader, skulle din robot bara att kunna gå framåt en liten bit. Om motorn är 360 graders modifieras, kan du ändra den att snurra kontinuerligt. Se till att motorn är 360 graders modifieras. Storlek / vikt är inte så viktigt i detta projekt eftersom du kommer förmodligen att ha gott om utrymme kvar ändå. Försök att få något medelstor. Vridmomentet är motorerna styrka. Dessa är vad de redskap som används för. Om det inte finns några växlar och vridmomentet är lågt, det förmodligen inte kommer att tillåta roboten att röra sig framåt, eftersom den inte har styrkan. Du vill ha ett högt vridmoment, men ju högre vridmoment, i allmänhet lägre hastighet. För denna robot, försöka få en bra balans mellan fart och vridmoment. Du kan alltid köpa och bifoga en mer kraftfull eller snabbare servo när du är klar byggnad. Det rekommenderas att få HiTec HS-311 servon för första RC robot. Denna servo har en bra balans mellan hastighet och moment, är billigt, och är en bra storlek för denna robot. Den HiTec HS-311 servo kan köpas
- Eftersom servo kan normalt bara snurra 180 grader du måste ändra det så det har kontinuerlig rotation. Ändra en servo ogiltigförklarar garantin, men det måste göras. För detaljerade instruktioner om hur du ändrar en servo go
- Välj ett batteri Du kommer att behöva få något för att driva din robot. Försök att inte använda AC (dvs koppla in den i väggen) makten. Du bör använda DC (dvs. batterier) makt.
- Välj batterityp * Det finns tre huvudsakliga typer av batterier som vi kommer att välja från. Dessa är Lithium Polymer (LiPo), NiMH, NiCd och Alkaline.
- Lipo batterier är de nyaste batterier som du kan få och är extremt lätt. Emellertid är de farliga, dyra och kräver en särskild laddare. Använd endast denna typ av batteri om du har erfarenhet av robotar och är villiga att spendera mer pengar på din robot.
- NiCd batterier är vanliga laddningsbara batterier. Dessa används i många robotar. Det största problemet med dessa batterier är om du laddar dem när de inte är helt döda, kommer de inte att pågå så länge på en full laddning.
- NiMH-batterier är mycket lik NiCd batterier i storlek, vikt och pris men har bättre prestanda och det är dessa batterier som vanligtvis rekommenderas för en nybörjare projekt.
- Alkaliska batterier är de vanligaste batterier som inte är uppladdningsbara. Dessa batterier är vanliga (Du har förmodligen en del), billig och lätt att få. Men de dör snabbt och du måste köpa dem om och om igen. Använd inte dessa.
- Välj Batterispecifikationer Du måste välja en spänning för batteriet. Den vanligast hos robotarna är 4.8V och 6.0V. De flesta servon kommer att bli bra att köra på någon av dem. Det brukar rekommenderas att gå med 6.0V (om dina servon kan hantera det, som de flesta kan) eftersom det tillåter dig att ha din servomotor går snabbare och har mer makt. Nu måste du hantera kapaciteten på din robotens batteripaket. Dessa är märkta som mah. Ju högre du kommer desto bättre, men dyrare och oftast tyngre. För storleken på roboten du bygger, det rekommenderar det om 1800 mAh. Om du måste välja mellan ett 1450 mAh batteri eller ett 2000 mAh batteri med samma spänning och vikt gå med 2000 mAh. Det kommer att bli dyrare med ett par dollar, men är ett runt bättre batteri för att få. Se till att du får en laddare för att ladda batteriet med. A 6.0V 2000mAh NiMH batteripack kan köpas
- Välj batterityp * Det finns tre huvudsakliga typer av batterier som vi kommer att välja från. Dessa är Lithium Polymer (LiPo), NiMH, NiCd och Alkaline.
- Välj ett material för din robot En robot behöver ett chassi att fästa all elektronik till. De flesta robotar denna storlek är gjorda av plast eller aluminium. För en nybörjare, det är rekommenderat att använda en typ av plast som kallas HDPE. Denna plast är lätt att arbeta med och billig. När beslut fattas tjockleken att få, få ca 1/4 "tjock. När man beslutar hur stor av ett ark för att få, bör du förmodligen få en ganska stor ark i fall du röra dig på skärning. Det brukar rekommenderas att få minst dubbelt Storleken på din robot. Men du antagligen borde få mer. A 1/4 "24" X24 "bit av HDPE kan köpas
- Välj en sändare / mottagare Detta kommer att bli den dyraste delen av din robot. Det kan också anses vara den viktigaste, för utan det, kan roboten inte göra någonting. Det är starkt rekommenderat att köpa en bra sändare / mottagare för att börja med, eftersom det är det som kommer att vara gränsen för hur mycket du kan sätta på. En billig sändare / mottagare kommer att flytta din robot bra, men du kommer inte att kunna lägga något till det. Dessutom kan sändaren användas för andra robotar som du kan bygga i framtiden. Så istället för att köpa en billig en nu och en dyrare senare, bara köpa det bättre nu. Det kommer att spara pengar i det långa loppet. Hur som helst, finns det några frekvenser som du kan använda. De vanligaste är 27Mhz, 72MHz, 75 MHz, och 2,4 GHz. 27MHz kan användas för flygplan eller bilar. Det är vanligast i billiga fjärrstyrda leksaker. 27MHz rekommenderas inte för någonting utom små projekt. 72MHz kan endast användas för flygplan. Eftersom 72MHz används normalt i stora modell flygplan, är det olagligt att använda i ytan fordon. Om du inte använder 72MHz, är inte bara du bryta mot lagen, men du kan störa en stor, dyr modell flygplan flyga i närheten. Detta skulle kunna få den att krascha och kan kosta mycket pengar att reparera, eller ännu värre krascha in i en person och skada eller till och med döda dem. 75MHz är gjord för bara yta användning, så att du kan använda den här. Dock är 2.4Ghz den bästa. Den har mindre störningar än någon av de andra frekvenser. Det är starkt rekommenderat att spendera de extra några dollar och få en 2.4Ghz sändare och mottagare. När ni beslutat om vilken frekvens du ska använda, måste du bestämma hur många "kanaler" du kommer att få på sändaren / mottagaren. Kanaler är ganska mycket hur många saker du kan styra på din robot. För denna robot du behöver minst två. En kanal kommer att låta din robot att gå framåt / bakåt och man kommer att tillåta det att gå åt vänster / höger. Men, det är rekommenderat att få minst 3. Detta beror på, när du byggt roboten, kanske du vill lägga till ytterligare en sak till det. Om du får 4, har du oftast två joysticks. Med en fyra kanals sändare / mottagare, kan du ha möjlighet att så småningom lägga en klo. Som sagt tidigare, ska du få den bästa sändaren / mottagaren din budget tillåter nu, så du behöver inte köpa en bättre senare. Du kan använda din sändare och även din receiver igen på andra robotar du kan bygga. Den Spektrum DX5e 5-Channel 2.4Ghz Radio System Mode 2 och AR500 kan köpas tillsammans
- Välj Wheels När du väljer hjul, de tre viktigaste sakerna du behöver oroa dig för är diameter, dragkraft, och om de kommer att lägga till dina motorer lätt. Diameter är längden av hjulet från en sida, genom centrumpunkten, till den andra sidan. Ju större diametern hos hjulet, desto snabbare går det och ju mer den kan klättra, men mindre vridmoment det kommer att ha. Om du har ett mindre hjul, det kanske inte kunna klättra mycket lätt eller gå väldigt snabbt, men det kommer att få mer makt. Traction är hur väl hjulen fastnar på ytan. Se till att du får hjul med gummi eller skum ring runt dem så att de inte bara glida runt. De flesta hjul som är gjorda för att fästa till servon, kommer att kunna bara skruva rätt på dem, så du behöver inte oroa dig för att så mycket. Det rekommenderas att få ett hjul någonstans mellan 3 och 5 inches i diameter med en gummiring runt dem. Du behöver 2 hjul. Precision disk hjul kan köpas
- Välja en servomotor för att flytta roboten måste du använda motorer. En motor viljestyrka ett hjul och en för andra. Detta gör att du kan använda den enklaste styrningen metoden, differential-enhet. Detta innebär att gå framåt båda motorerna snurra framåt, gå bakåt båda motorerna snurra baklänges, och att vända en motor går och en motor stannar fortfarande. En servomotor är annorlunda än en grundläggande likströmsmotor eftersom en servomotor är inriktad, kan endast vridas 180 grader, och kan överföra data tillbaka på dess position. Detta projekt kommer att använda servomotorer eftersom det är lättare och du behöver inte köpa en dyr "varvtalsregulator" eller en separat växellåda. När du förstår hur man bygger en fjärrstyrd robot, kanske du vill göra en till (eller modifiera den första) att använda likströmsmotorer, snarare än servomotorer. Det finns fyra grundläggande saker du behöver oroa dig för när du köper servomotorer. Dessa är varvtal, vridmoment, storlek / vikt, och om de är 360 Modifierbara. Eftersom servomotorer bara vänder 180 grader, skulle din robot bara att kunna gå framåt en liten bit. Om motorn är 360 graders modifieras, kan du ändra den att snurra kontinuerligt. Se till att motorn är 360 graders modifieras. Storlek / vikt är inte så viktigt i detta projekt eftersom du kommer förmodligen att ha gott om utrymme kvar ändå. Försök att få något medelstor. Vridmomentet är motorerna styrka. Dessa är vad de redskap som används för. Om det inte finns några växlar och vridmomentet är lågt, det förmodligen inte kommer att tillåta roboten att röra sig framåt, eftersom den inte har styrkan. Du vill ha ett högt vridmoment, men ju högre vridmoment, i allmänhet lägre hastighet. För denna robot, försöka få en bra balans mellan fart och vridmoment. Du kan alltid köpa och bifoga en mer kraftfull eller snabbare servo när du är klar byggnad. Det rekommenderas att få HiTec HS-311 servon för första RC robot. Denna servo har en bra balans mellan hastighet och moment, är billigt, och är en bra storlek för denna robot. Den HiTec HS-311 servo kan köpas
- 4Beställ dina delar nu när du har valt dina delar, gå vidare och beställa dem på nätet. Försök att beställa dem från så få platser som möjligt, eftersom du kanske kan spara pengar på sjöfarten på det sättet om du beställer allt på samma gång.
- 5Mät och kapa ditt chassi får ut en linjal och en sharpie och mäta ut längden och bredden på ditt chassi på det material du använder för ditt chassi. Jag rekommenderade ca 15 cm med ca 20 cm. Nu, mäta igen och se till att dina linjer är inte krokig och är hur länge du vill ha dem. Kom ihåg, mäta två gånger, klipp en gång. Nu kan du klippa. Om du använder HDPE, bör du kunna klippa det på samma sätt som du skulle skära en bit av trä som storlek.
- 6Montera roboten nu att du har alla dina material och du chassi cut, behöver du bara samla ihop allt. Detta kan faktiskt vara det enklaste steget om man har designat roboten väl.
- Montera servomotorerna på undersidan av den bit av plast nära fronten. De bör vara i sidled så att axeln / horn (den del av servo som rör sig) vända sidorna. Se till att det finns tillräckligt med utrymme för att montera hjulen.
- Montera hjulen till servo med skruvarna som följde med servo.
- Fäst en bit kardborrebanden på mottagarenheten och en annan på batteriet.
- Lägg två bitar av motsatt kardborreband på roboten och hålla din mottagare och batteri till den.
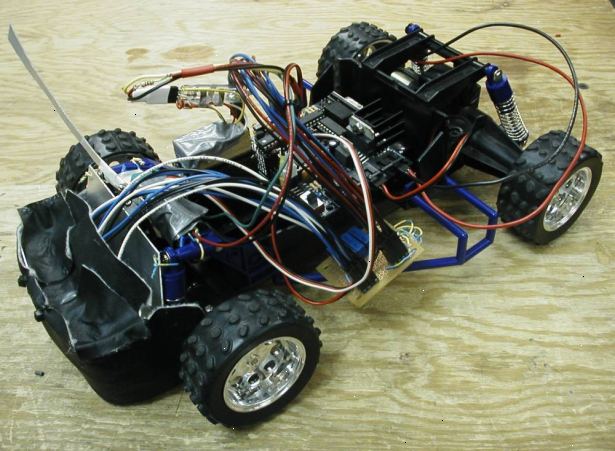
- Du bör nu ha en robot som har två hjul fram och sluttar ner mot ryggen. Det kommer inte att bli en "tredje hjulet" på denna robot, istället ryggen kommer bara glida längs golvet.
- 7Anslut kablarna i nu när du har roboten monteras, behöver du bara plugga in allt i mottagaren. Anslut batteriet till där det står "batteri" på mottagaren. Se till att du sätter i den på rätt sätt. Nu, plugg servona i de två första kanalerna på mottagaren, där det står "kanal 1" och "kanal 2".
- 8Ladda upp koppla bort batteriet från mottagaren och anslut den till laddaren. Vänta tills batteriet är färdigladdad. Detta kan ta hela 24 timmar, så ha tålamod.
- 9Spela med det du nu ska allt göras. Gå framåt, framåt på sändaren. Bygg en hinderbana för det, leka med din katt. Nu när du är klar att spela med den. Lägg lite saker till det!.
Tips
- Kontrollera att sändare och mottagare du köper är samma frekvens. Se också till att mottagaren har samma eller mer mängd kanaler som sändaren. Om det finns flera kanaler på mottagaren än sändaren, kommer endast den lägsta mängd kanaler vara användbara.
- Lägg till grejer. Om du hade en extra kanal på din sändare / mottagare, kan du lägga till ytterligare en servomotor för att göra något extra. Om du har en extra kanal, försöka göra en klo som kan stänga. Om du har två extra kanaler, försöka göra en klo som kan öppna / stänga och flytta vänster och höger. Använd din fantasi.
- Du kan behöva köpa en adapter som låter dig koppla in batteriet i laddaren.
- Om du trycker på höger och roboten går kvar, prova att byta den ingång som du har anslutit servona in på mottagaren. dvs Om du har anslutit rätt servo till kanal 1 och den vänstra till kanal 2, slå dem och koppla rätt in i kanalen 2 och den vänstra till kanal 1.
Varningar
- Nybörjare bör inte försöka använda växelström (dvs ansluten till vägguttaget) för någon hemlagad projekt. Nätström är extremt farligt.
- Använd inte frekvensen 72MHz om du bygger ett flygplan. Om du inte använder det på en yta fordon, inte bara är det olagligt, men du kan skada eller till och med döda någon.
Saker du behöver
- Material för ditt Chassi: HDPE är ca 15€ 0,00 för den storlek du ska få, och du kommer att ha gott extra.
- Två servomotorer: Hitec HS-311 servon är ca 10 0,00€ vardera.
- En mottagare: mottagaren av sändare som monteras inne i helikoptern
- A Batteri: Ett 6,0 V 2000mAh NiMH batteri är ca 20€ 0,00.
- En batteriladdare: En batteriladdare är ca 15€ 0,00.
- 2 Hjul: Precision Disk Hjul 5 tum i diameter är ca 10 0,00€ vardera.
- Sticky Velcro